cmpt_401_portfolio
Lab Assignment 6
Oct. 30, 2023
Tutorial Media
Chapter 17.2
Chapter 18.1
Chapter 18.2
Chapter 19.1
Chapter 20.1
Assignment project 1:
Description:
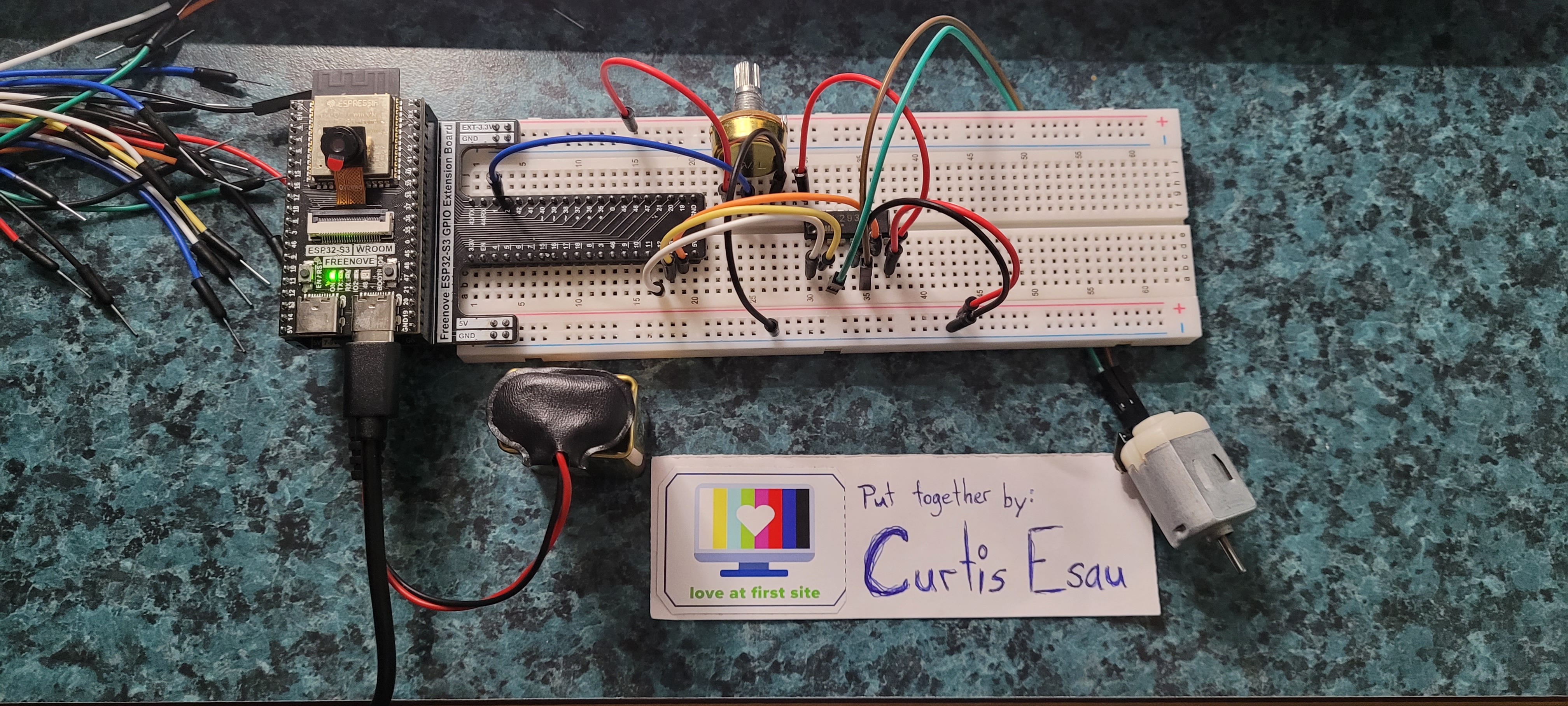
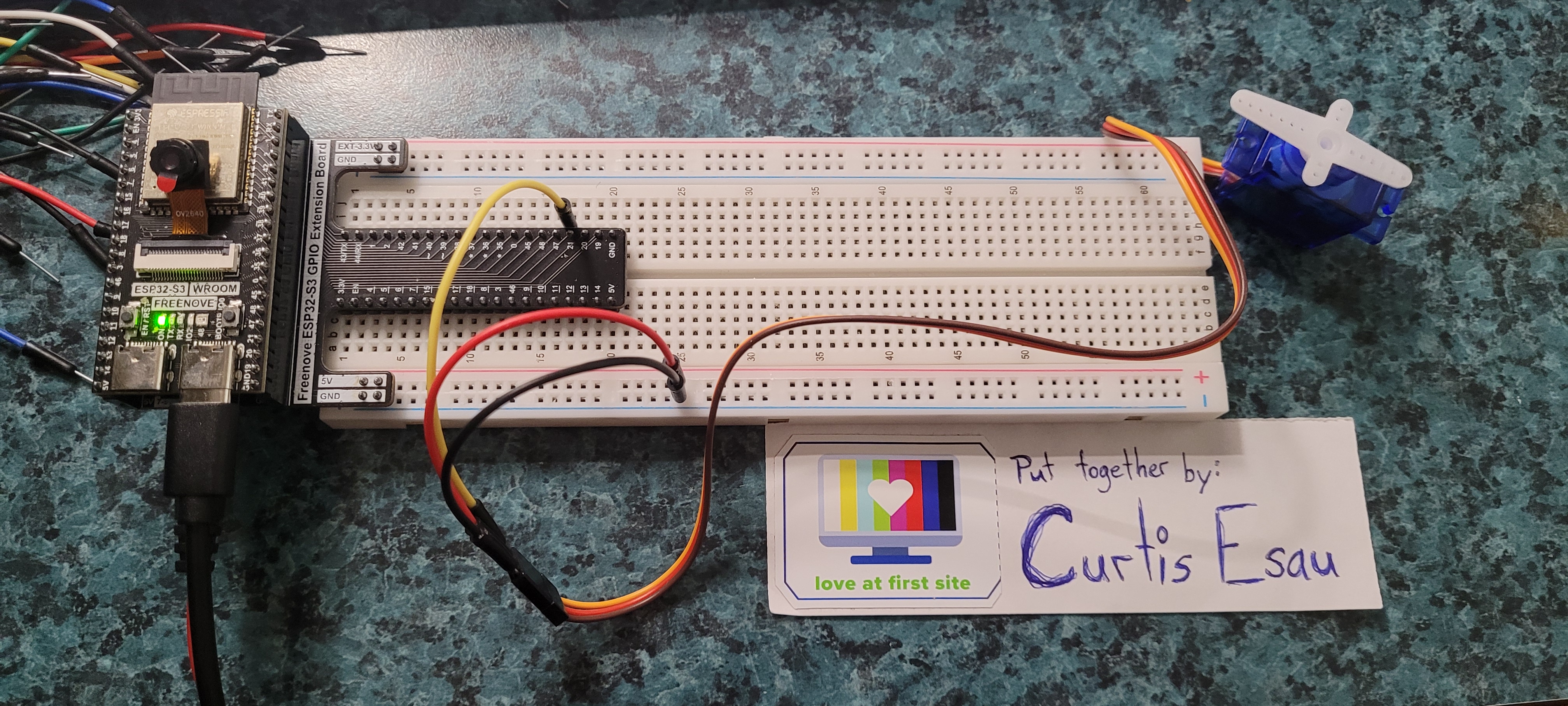
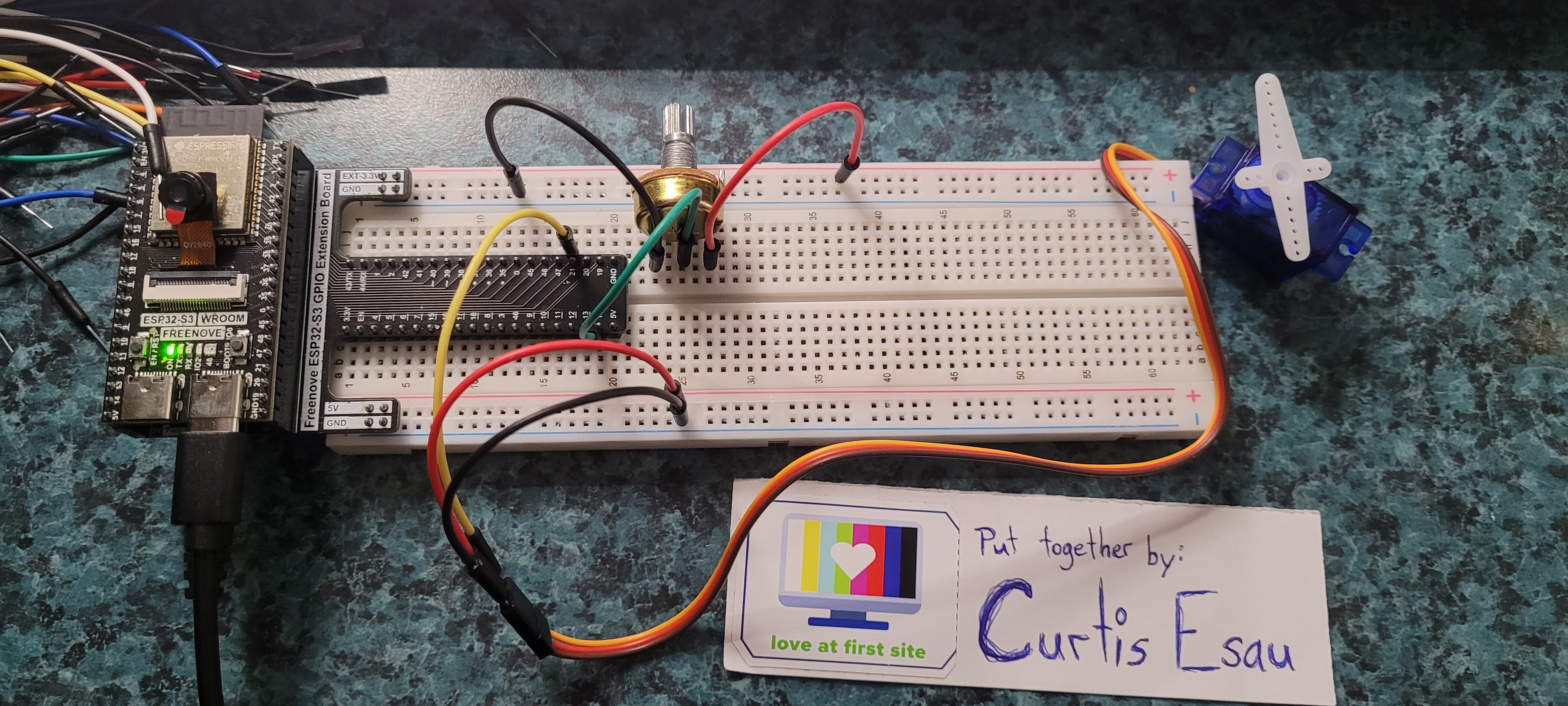
A system that, when a photoresistor perceives relative darkness, waves a hand, flashes a LED light, and sings a sad song.
List of hardware components:
| Component | Amount |
|---|---|
| ESP32-S3-WROOM | 1 |
| GPIO Extension Board | 1 |
| Project Board | 1 |
| LED Blue | 1 |
| Photoresistor | 1 |
| Servo Motor | 1 |
| Hand Attachement | 1 |
| Passive Buzzer | 2 |
| NPN | 2 |
| Wire M-M | 6 |
| Resistor - 220 Ω | 1 |
| Resistor - 1K Ω | 2 |
| Resistor - 10K Ω | 1 |
Circuit diagram:
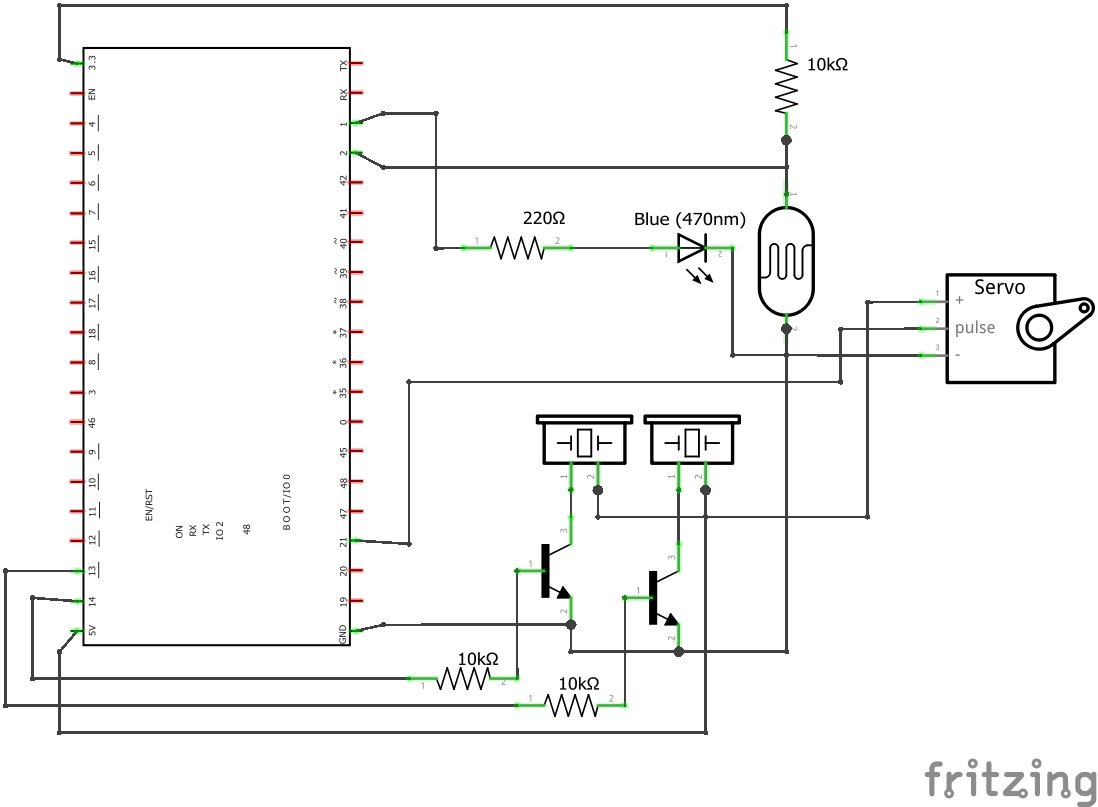
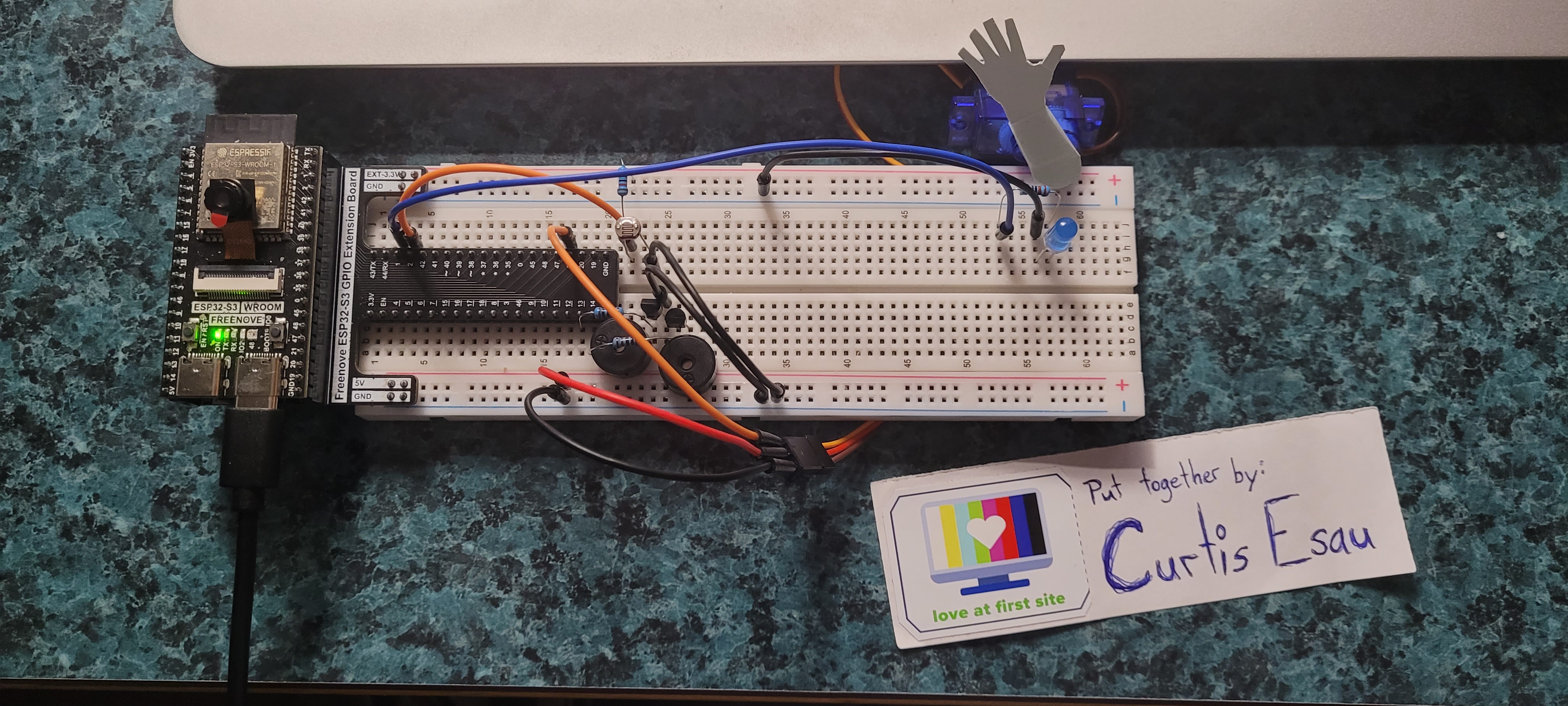
Photo of breadboard:
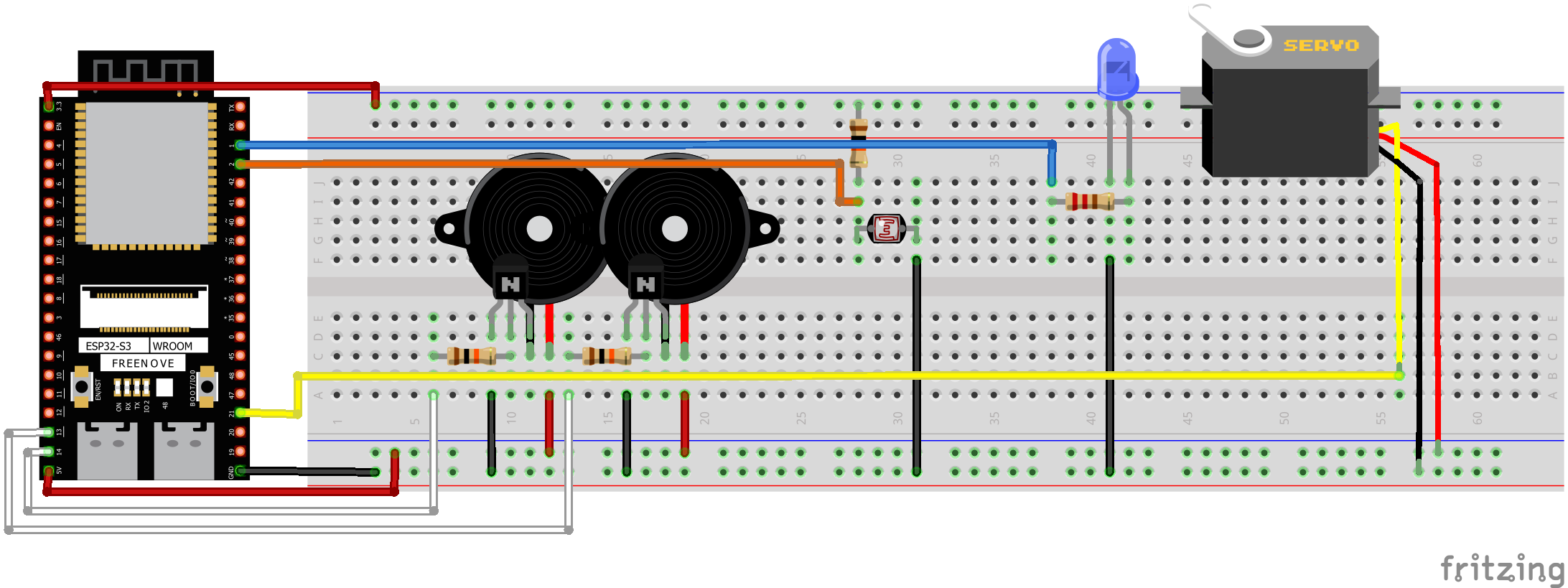
Breadboard view:
Source code:
from machine import Pin,PWM,ADC
from myservo import myServo
from notes import *
import time
servo=myServo(21) # set servo pin
servo.myServoWriteAngle(0) # set initial servo angle
time.sleep_ms(1000)
led = Pin(1,Pin.OUT) # set led pin
adc = ADC(Pin(2)) # set photoresistor pin
adc.atten(ADC.ATTN_11DB)
adc.width(ADC.WIDTH_12BIT)
def remap(value,oldMin,oldMax,newMin,newMax):
return int((value)*(newMax-newMin)/(oldMax-oldMin))
pB1 = PWM(Pin(13),2000) # for treble
pB2 = PWM(Pin(14),1000) # for bass
pB1.deinit() # turn off initial sound
pB2.deinit() # "
myWay = [ # song progression from "My Way" by Frank Sinatra
#1
[0,F(2)],[],[0,0],[0,C(3)],[],[0,0],
[0,F(3)],[],[0,0],[0,C(3)],[],[0,0],
[0,A(3)],[],[0,0],[0,C(3)],[],[0,0],
[0,F(3)],[],[0,0],[0,C(3)],[],[0,0],
#2
[0,F(2)],[],[0,0],[0,C(3)],[],[0,0],
[0,F(3)],[],[0,0],[0,C(3)],[],[0,0],
[0,A(3)],[],[0,0],[0,C(3)],[],[0,0],
[0,F(3)],[],[0,0],[C(4),C(3)],[],[0,0],
#3
[A(4),F(2)],[],[1,0],[1,C(3)],[],[1,0],
[1,F(3)],[],[1,0],[1,C(3)],[],[1,0],
[1,A(3)],[],[0,0],[C(4),C(3)],[],[0,0],
[A(4),F(3)],[],[0,0],[C(4),C(3)],[],[0,0],
#4
[A(4),E(2)],[],[1,0],[1,C(3)],[],[1,0],
[1,F(3)],[],[1,0],[1,C(3)],[],[1,0],
[1,A(3)],[],[0,0],[C(4),C(3)],[],[0,0],
[A(4),E(3)],[],[0,0],[G(4),C(3)],[],[0,0],
#5
[A(4),D_(2)],[],[1,0],[1,C(3)],[],[1,0],
[1,D_(3)],[],[1,0],[1,C(3)],[],[0,0],
[C(4),G(3)],[],[1,0],[0,C(3)],[A(4),1],[1,0],
[1,C(3)],[0,1],[G(4),0],[1,C(3)],[],[0,0],
#6
[G(4),D(2)],[],[0,0],[F_(4),C(3)],[],[1,0],
[1,F_(3)],[],[1,0],[1,C(3)],[],[1,0],
[1,A(3)],[],[1,0],[1,C(3)],[],[0,0],
[0,F(3)],[],[0,0],[D(4),C(3)],[],[0,0],
#7
[A_(4),G(2)],[],[1,0],[1,A_(2)],[],[1,0],
[1,F(3)],[],[1,0],[1,D(3)],[],[1,0],
[1,B(3)],[],[0,0],[D(4),D(3)],[],[0,0],
[A_(4),G(3)],[],[0,0],[A(4),A_(2)],[],[0,0],
#8
[A_(4),F(2)],[],[1,0],[1,D(3)],[],[1,0],
[1,G(3)],[],[1,0],[1,D(3)],[],[1,0],
[1,B(3)],[],[0,0],[D(4),D(3)],[],[0,0],
[A_(4),G(3)],[],[0,0],[A(4),A_(2)],[],[0,0],
#9
[A_(4),E(2)],[],[1,0],[1,A_(2)],[],[1,0],
[1,E(3)],[],[1,0],[1,C(3)],[],[1,0],
[1,G(3)],[],[0,0],[A_(4),C(3)],[],[0,0],
[C(5),E(3)],[],[0,0],[G(4),A_(2)],[],[0,0],
#10
[A_(4),F(2)],[],[0,0],[A(4),C(3)],[],[1,0],
[1,F(3)],[],[1,0],[1,C(3)],[],[1,0],
[1,A(3)],[],[1,0],[1,C(3)],[],[0,0],
[0,F(3)],[],[0,0],[F(4),C(3)],[],[0,0],
#11
[C(5),F(2)],[],[1,0],[1,C(3)],[],[1,0],
[1,F(3)],[],[1,0],[1,C(3)],[],[1,0],
[1,E(3)],[],[0,0],[B(4),C(3)],[],[0,0],
[C(5),A(3)],[],[0,0],[A_(4),C(3)],[],[0,0],
#12
[C(5),F(2)],[],[1,0],[1,C(3)],[],[1,0],
[1,D_(3)],[],[1,0],[1,C(3)],[],[1,0],
[1,A(3)],[],[0,0],[D(5),C(3)],[],[0,0],
[A(4),E(3)],[],[0,0],[C(5),C(3)],[],[0,0],
#13
[A_(4),B(1)],[],[1,0],[1,D(3)],[],[1,0],
[1,F(3)],[],[1,0],[1,D(3)],[],[1,0],
[1,B(3)],[],[0,0],[A(4),D(3)],[],[0,0],
[A_(4),F(3)],[],[0,0],[A(4),D(3)],[],[0,0],
#14
[C(5),G(2)],[],[0,0],[A_(4),D(3)],[],[1,0],
[1,F(3)],[],[1,0],[1,D(3)],[],[1,0],
[1,B(3)],[],[1,0],[1,D(3)],[],[0,0],
[C(5),F(3)],[],[1,0],[1,D(3)],[],[0,0],
#15
[A(4),F(2)],[],[1,0],[1,C(3)],[],[1,0],
[1,F(3)],[],[1,0],[1,C(3)],[],[1,0],
[1,A(3)],[],[0,0],[C(4),C(3)],[],[0,0],
[A_(4),F(3)],[],[0,0],[A(4),C(3)],[],[0,0],
#16
[G(4),C(2)],[],[1,0],[1,A_(2)],[],[1,0],
[1,F(3)],[],[1,0],[1,B(2)],[],[0,0],
[E(4),G(3)],[],[1,0],[1,A_(2)],[],[0,0],
[F(4),E(3)],[],[0,0,],[G(4),A_(2)],[],[0,0],
#17
[G(4),F(2)],[],[1,0],[1,A_(2)],[],[1,0],
[1,D(3)],[A_(4),1],[D(5),0],[G(5),A_(2)],[B(5),1],[D(6),0],
[G(6),F(3)],[],[1,0],[1,A_(2)],[],[1,0],
[1,D(3)],[],[1,0],[1,A_(2)],[],[0,0],
#18
[F(4),F(2)],[],[1,0],[1,A(2)],[],[1,0],
[1,C(3)],[],[1,0],[1,A(2)],[],[1,0],
[1,F(3)],[],[1,0],[1,A(2)],[],[0,0],
[0,C(3)],[],[0,0],[C(4),A(2)],[],[0,0]
]
incre = 0
def Play(song, inc): # play song in array format
print(inc,song[inc])
if len(song[inc]) == 2:
if not song[inc][0] == 0 and not song[inc][0] == 1:
pB1.init()
pB1.freq(song[inc][0])
elif not song[inc][0] == 1:
pB1.deinit()
if not song[inc][1] == 0 and not song[inc][1] == 1:
pB2.init()
pB2.freq(song[inc][1])
elif not song[inc][1] == 1:
pB2.deinit()
speed = 9
try:
while True:
if adc.read() > 2200: # listen light changes
for i in range(60,120,1): # move hand one way
Play(myWay, incre) # play song
if i%speed==0:
incre += 1
servo.myServoWriteAngle(i)
time.sleep_ms(15)
led.value(1) # led on
if adc.read() < 2200: # listen light changes
incre = 0
break
for i in range(120,60,-1): # move hand other way
Play(myWay, incre) # play song
if i%speed==0:
incre += 1
servo.myServoWriteAngle(i)
time.sleep_ms(15)
led.value(0) # led off
if adc.read() < 2200: # listen light changes
incre = 0
break
pB1.deinit()
pB2.deinit()
except Exception as e:
print("Error:", e)
servo.deinit()
pB1.deinit()
pB2.deinit()
Additional file: notes.py
Video:
Follow this youtube link for the video: https://youtu.be/13jHvRl1cuc
Assignment project 2:
Description:
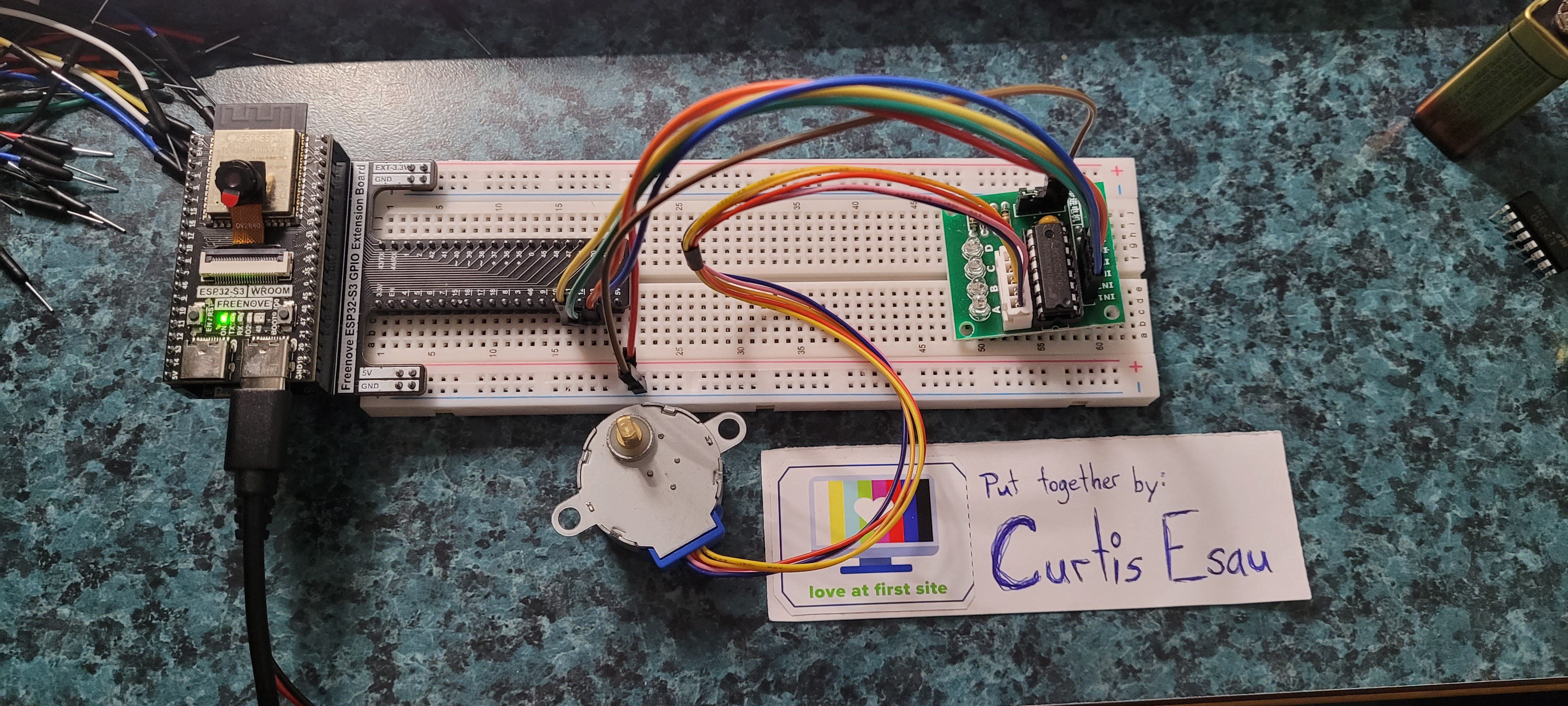
When a thermistor reads relative heat, change an LCD from a positive temperature message to an advice message and turn on a fan with a DC motor. Once the termistor cools off again, return message to default and turn off fan.
List of hardware components:
| Component | Amount |
|---|---|
| ESP32-S3-WROOM | 1 |
| GPIO Extension Board | 1 |
| Project Board | 1 |
| L293D chip | 1 |
| LCD 1602 Display | 1 |
| Thermistor | 1 |
| DC Motor | 1 |
| Resistor - 10k Ω | 1 |
| Wire M-F | 4 |
| Wire M-M | 11 |
Special: Borrowed fan component from Jonah Watts
Circuit diagram:
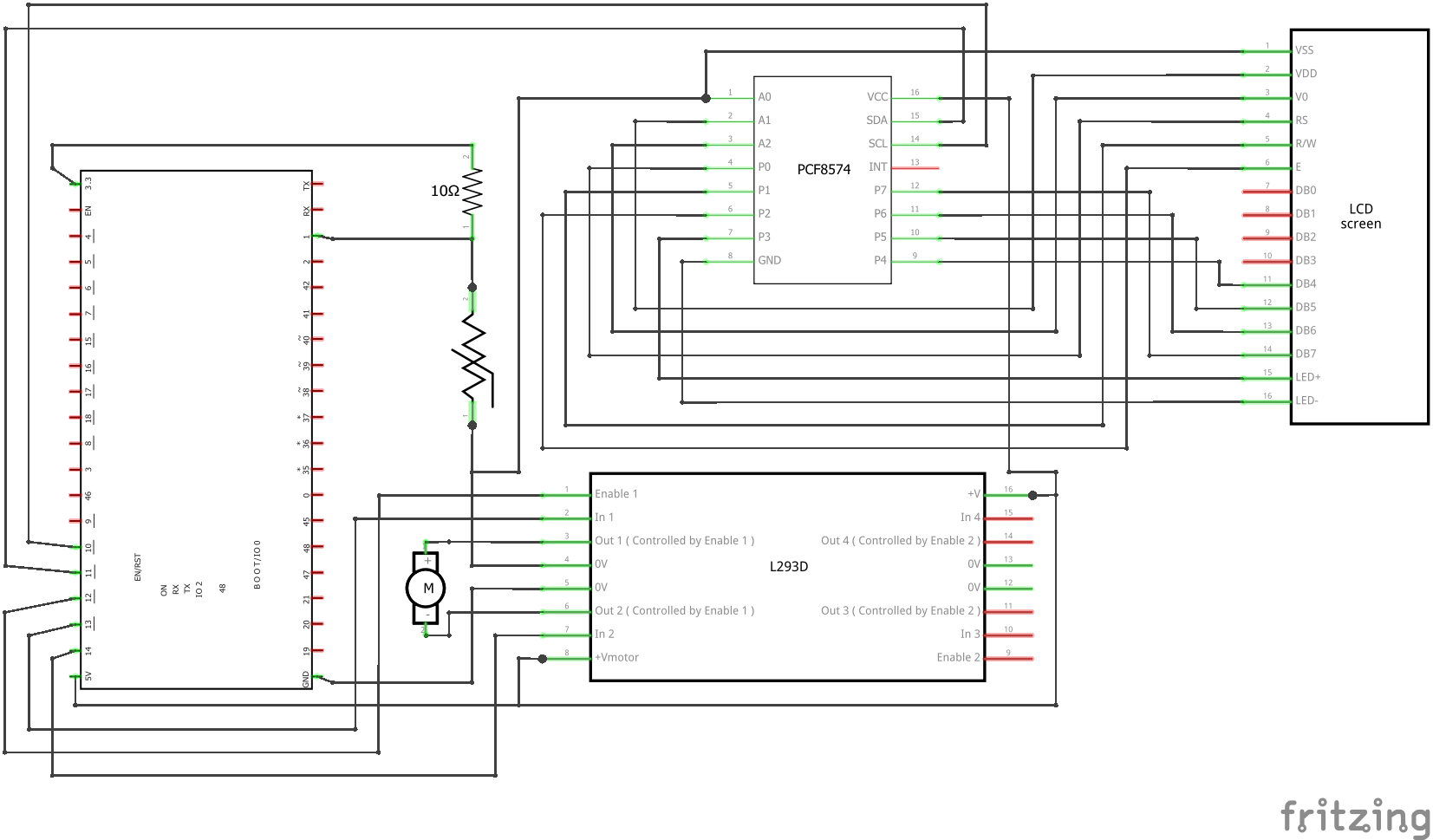
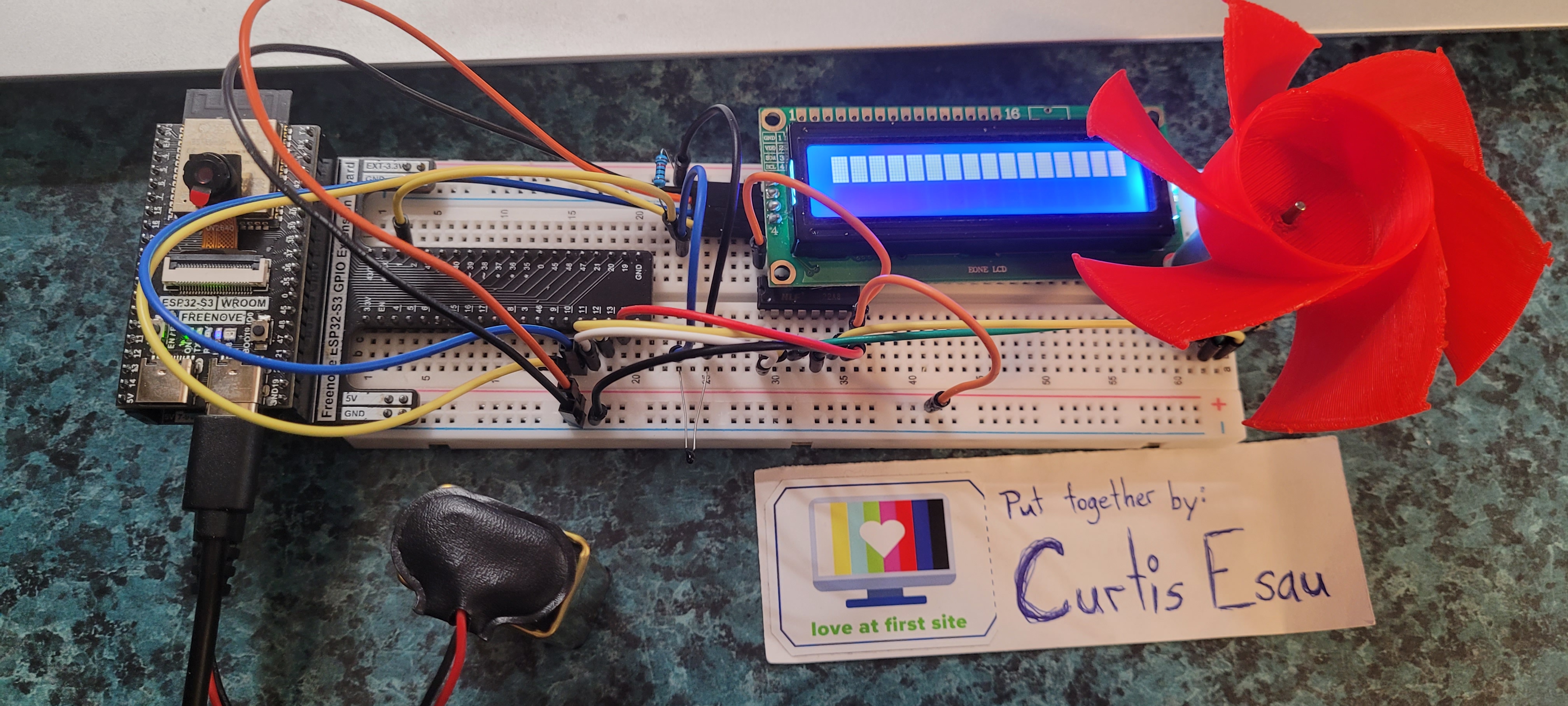
Photo of breadboard:
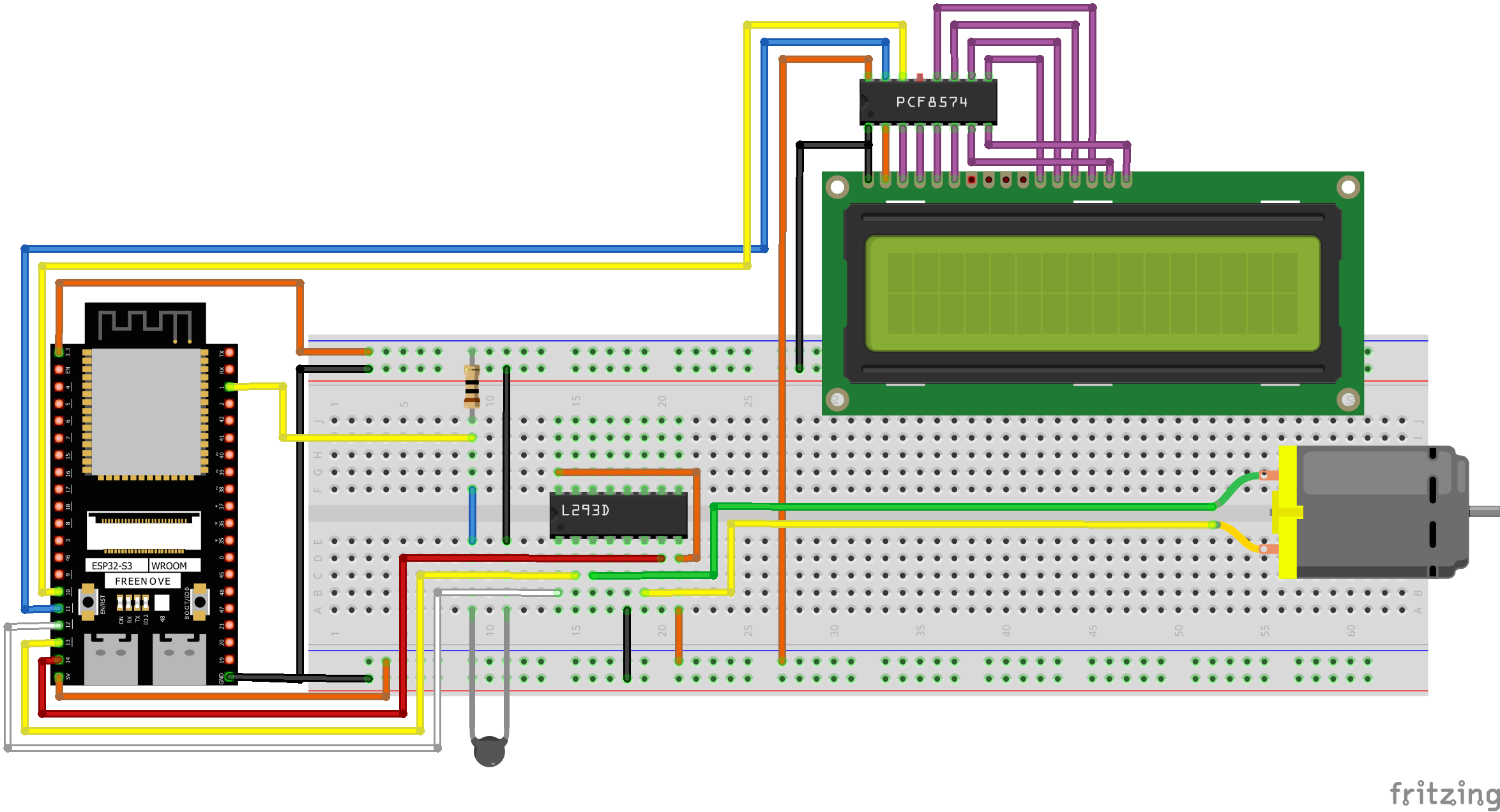
Breadboard view:
Source code:
from machine import Pin,PWM,I2C,ADC
from I2C_LCD import I2cLcd
import time
import math
i2c = I2C(scl=Pin(10), sda=Pin(11), freq=400000) # Test for I2C devices (LCD)
devices = i2c.scan()
if len(devices) == 0:
print("No i2c device !")
else:
for device in devices:
print("I2C addr: "+hex(device))
lcd = I2cLcd(i2c, device, 2, 16)
in1Pin=Pin(13, Pin.OUT) # Set in-pins for L293D chip
in2Pin=Pin(14, Pin.OUT)
enablePin=Pin(12, Pin.OUT) # Set enabling pin for L293D chip
pwm=PWM(enablePin,10000) # set motor pin for L293D chip
adc=ADC(Pin(1)) # Set Thermistor analog reader
adc.atten(ADC.ATTN_11DB)
adc.width(ADC.WIDTH_12BIT)
def readTemp(adc): # Read and return Thermistor value
adcValue=adc.read()
voltage=adcValue/4095*3.3
Rt=10*voltage/(3.3-voltage)
tempK=(1/(1/(273.15+25)+(math.log(Rt/10))/3950))
tempC=tempK-273.15
print("Temperature :",tempC)
return tempC
hot = False
tempChange = 29.9
try:
in1Pin.value(1) # set motor spin direction
in2Pin.value(0)
while True:
if readTemp(adc) > tempChange: # if thermistor heats up
hot = True
time.sleep_ms(10)
if not hot: # while not hot, display:
lcd.move_to(0, 0) # "This is a good temperature."
lcd.putstr("This is a good")
lcd.move_to(0, 1)
lcd.putstr("temperature. ")
while hot:
lcd.move_to(0, 0) # while hot, display:
lcd.putstr("Cool ") # "Cool yourself down."
lcd.move_to(0, 1)
lcd.putstr("yourself down.")
pwm.duty(800) # turn on fan
if readTemp(adc) <= tempChange: # if thermistor cools down
hot = False
pwm.duty(0) # turn off fan
time.sleep_ms(10)
print(hot)
except Exception as e:
pwm.deinit()
print("Error:", e)